|
Der REX-6 kam an, ich kam aber erst heute zurück von... abroad, und muss in 24h wieder los (für 10 Tage).
Nach erstem Ansehen:
EX Bus ist was neues von JETI, hat mit EX Telemetrie gar nichts zu tun. Das physische und logische Protokoll ist völlig anders, 125/250kBd statt 9k6, 8 Bits statt 9, usw. Das ist bidirektional, ein bisschen á la S.Bus2, Servokanaldaten in eine Richtung, Sensordaten in die andere.
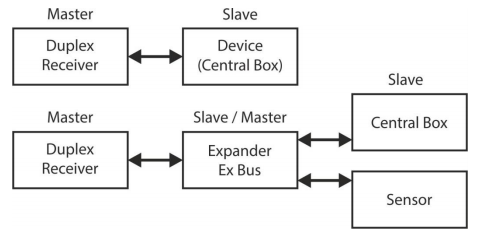
Leider ist das wieder nur eine Point-2-Point Terminaltopology, - braucht einen "Expander EX Bus", um mehr als zwei Busteilnehmer zusammen zu bringen (diesen Expander scheint JETI noch nicht anzubieten). Es ist also wieder kein Bus, die Bezeichnung "EX Bus" ist an der Realität vorbei.
Im Augenblick kann der EX Bus Anschluß eines Empfängers nur eine sog. "Central Box" konnektieren (oder eben ein FBL, was das versteht). Die übersetzt Steuerdaten, gegeben in "EX Bus Protocol" oder PPM, in Servo PWM und kann Sensordaten eines EX Bus sprechenden Sensors in EX Telemetrie übersetzen.
Das heißt: "E1" und "E2" des REX-6 sind als EX Bus Anschluß umfunktionierbare Servo-PWM-Ausgänge (Y5, Y6), - für die Telemetrie aber, die bisher JEDER Sensor von JETI und 3rd Party spricht (JETI v1 und EX), hat er wie jeder andere Empfänger nur den einen Anschluß "Ext.". Hat man mehr als einen physischen Sensor, braucht man einen Expander (E2 EX oder E4 EX) zwischen Rx "Ext." und den Sensoren.
Es ist nun nicht ausgeschlossen, dass das Rx-interne notwendige Multiplexing (á la bisherigem Expander) zwischen Sensordaten vom viel schnelleren EX Bus (vom Spirit) und Daten, die 12,5 bis 25x langsamer vom "Ext." Anschluß kommen (JETI EX Telemetry Sensors, 9k6), nicht rund ist, die Datenpakete von klassischen JETI EX Sensoren zu sehr benachteiligt, weshalb Display-Anmeldung behindert wird und Daten-Displays auf Timeout laufen können. Verwundern würde es mich nicht, hat man (JETI) es doch bisher nicht mal verstanden, einen klassischen Expander zu bauen, der mit binären EX Messages adäquat umgehen kann.
Ich hatte mal vor inzwischen geraumer Zeit aus den "inneren Untiefen" von JETI einen Entwurf des neuen Protokolls bekommen, das sah aber noch anders aus und hieß auch nicht "EX Bus". Könnte nun sein, dass der Hersteller des Spirit als Landsmann ganz nah an der JETI Entwicklung klebt, und daher sein FBL als u.a. ersten Sensor via EX Bus implementieren konnte. Die Servokanaldaten nimmt der ja eh vom EX Bus.
----------
Anders gesagt: Ich vermute, dass das Problem geht, wenn man Servokanaldaten nicht per EX Bus an das Spirit sendet, denn dabei anwortet der dann auch als Sensor, und das Handling seiner Sensordaten scheint die Nutzbarkeit der Sensordaten auf "Ext." zu sehr einzuschränken, s.o. Schickt man dem Spirit alternativ die Kanaldaten per PPM, wird das Problem wahrscheinlich verschwinden.
Insgesamt gesehen, ist das eine sehr miserable Informationspolitik von JETI, und ich muss mich korrigieren: Sie scheinen doch noct nicht verstanden zu haben, welche Bedeutung 3rd Party für deren Produkte am Markt hat. Verdammt unprofessionell...
-----------
Ich schaue mal, ob ich morgen noch ein paar Minuten finde für den REX mit E1/E2 aktiviert als "EX Bus".
| Dateianhänge: |
JETI-EXbus.png [ 29.73 KiB | 6144-mal betrachtet ]
|
_________________
Tom
|