Der CAN Bus Port der PMU ist zunächst der erste und einzige CAN Bus Anschluss im NAZA System,. Hiermit verbindet man C2T mittels des mitgelieferten Kabels. Das Kabel ist von DJI, Standard mit zwei großen Steckern.
Wer trotzdem noch ein OSD verwenden will, was sich am CAN Bus anschließt, steckt das OSD an die PMU und C2T auf einen freien CAN Bus Port des OSD.
Mit dem zweiten mitgelieferten Kabel (zwei kleine Stecker, 4 Adern) verbindet man einen der beiden Data Ports des C2T (egal, welchen man nimmt) mit dem Data Port des JLog2.6.
C2T’s Stromversorgung erfolgt vom CAN Bus und parallel auch durch JLog via das Data Kabel. JLog wird am einfachsten via seinen “JIVE Port” mit Betriebsspannung versorgt, per Servokabel. Bitte beachten, dass hier der “gelbe Pin”, sonst “Signal”, Plus ist! Als Spannungsverteiler kann ein Port der NAZA Main Unit dienen, hier liegen +5V, die Ausgangsspannung der PMU, an. (siehe das Bild oben)
——————————-
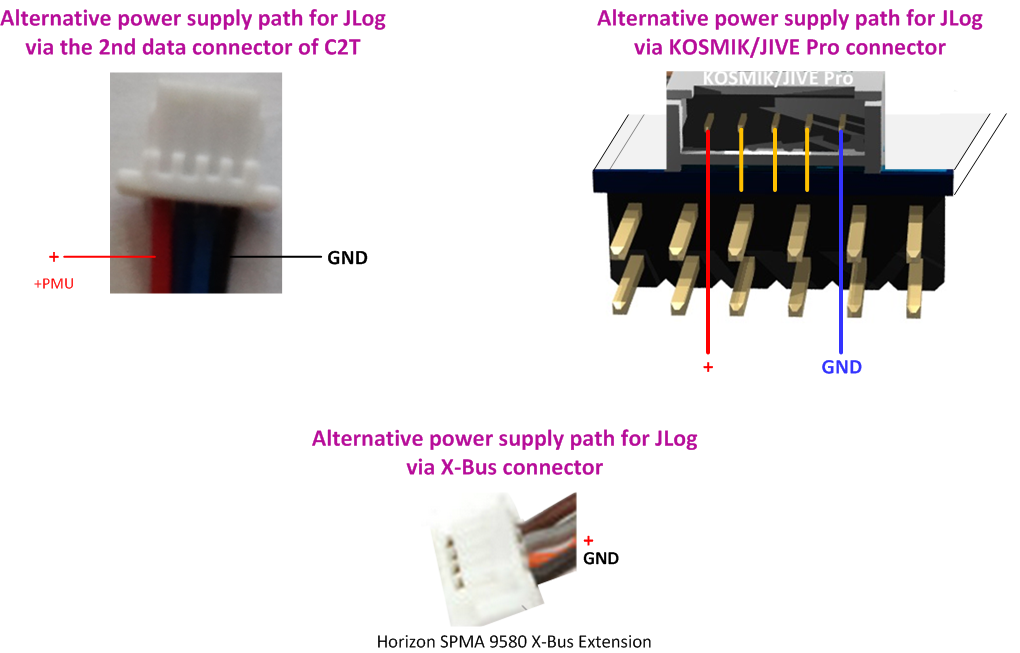
Wer will, kann einen der alternativen Spannungsversorgungspfade von JLog2.6 verwenden:
- via den freien zweiten Data Port des C2T (s.Bild unten): Man benötigt ein zweites Data Kabel C2T–JLog, von dem man nur 2 Leitungen nutzt und auf einer Seite den Stecker entfernt, um eine Einspeisung seiner Wahl zu verwenden. Max. 12V sind zulässig, aber man sollte bei den 5V der PMU bleiben. Darüber wird sowohl C2T als auch JLog mit Betriebsspannung versorgt, wobei C2T die ca. 6V auf dem CAN Bus als Alternative hat.
- via den X-Bus Port von JLog (s.Bild unten)
- via den KOSMIK Port von JLog (s.Bild unten)
Ein X-Bus Kabel zum Modifizieren gibt’s von Horizon (SPEKTRUM), ein KOSMIK Kabel von einem Händler, der JLog führt. (Bitte beachten, dass das TelMe Kabel von Kontronik im Vergleich zum KOSMIK Kabel von R2 (JLog) spiegelbildlich belegt ist!)
Im Falle, die Telemetrie ist SPEKTRUM, ist der X-Bus Port von JLog besetzt, hier wird der TM1000 angeschlossen. Der TM1000 versorgt JLog (und C2T) mit seiner R/C-Rohspannung.
PMU ist ein Knotenpunkt des Systems. Hier wird der CAN Bus aufgespannt, die NAZA Main Unit konnektiert, der GPS-Pilz asynchron-seriell angebunden. Außerdem ist PMU ein BEC, Buck Regler (Step-Down), bis zu 6S auf 5,0V @max.3A. Ohne PMU läuft nichts, jedenfalls nichts mit C2T/JLog oder OSD. Der Buck in PMU kann einfach mal so das Zeitliche segnen.. Dann erscheint i.allg. die Rohspannung am Ausgang, bei Glück mit etwas höherer Impedanz.. Man staunt nicht schlecht, wenn man plötzlich, wie es mir ging, 20.nnV Ubec auf dem Display liest, auf dem vom Empfänger auch.. Glücklicherweise.., alles hat überlebt, Empfänger (JETI Rsat2, Futaba R7008), NAZA M/v2, GPS-Pilz, C2T und JLog. Ich hatte einfach nur Massel, es bestand zumindest die Chance, auf einen Schlag 6 Microcontroller und den UBlox in den Himmel zu schießen. Der Pilz hat das Glück, dass er 3,3V interne Spannung der MCU in der PMU bekommt (weiterer Spannungsregler), die ca. 6V für den CAN Bus werden auch zumindest in einer zweiten Stufe erzeugt. Da PMU unverzichtbar ist: Ich konnte mir damit behelfen, dass ich PMU am Eingang 8V gab, damit tickt dessen Microcontroller, der Pilz wird versorgt mit 3,3V und der CAN Bus Transceiver läuft stabil. Dann mache ich aus den 8V (7808) noch mal 5V (7805) für NAZA, JLog/C2T und Empfänger. Da das Linearregler sind (78xx), ist es auch gut, dass sich die Verlustleistung etwas aufteilt dabei. Allerdings geht es je gegen 2W bei 6S, die wollen abgeführt werden. Ein Häufigflieger sollte wohl besser immer eine Ersatz-PMU dabei haben.