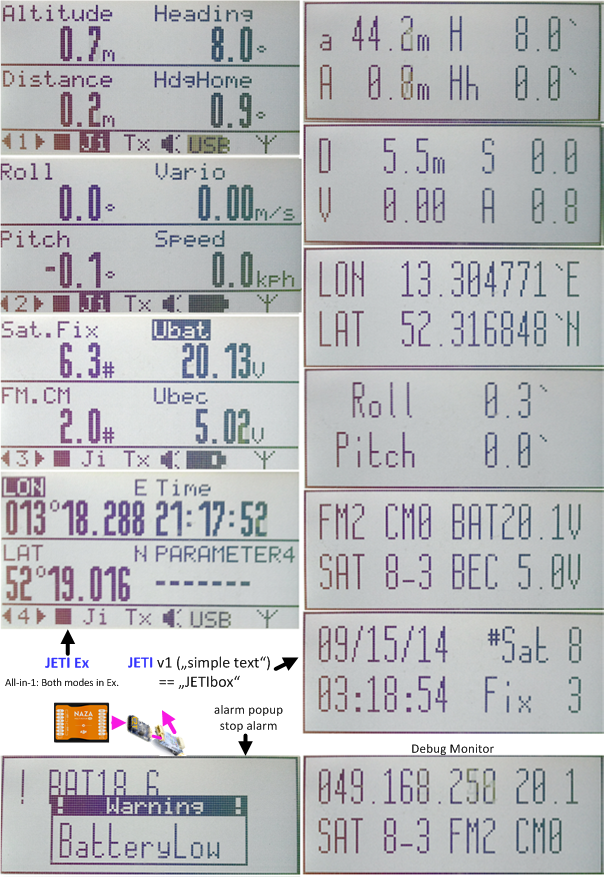
Höhe (Altitude) als Höhe über Grasnarbe bildet C2T aus dem Absolutwert für Höhe (nach Wetterlage, sprich, Basis-Luftdruck), den er beim Einschalten sah, und dem Momentanwert.
Distanz errechnet sich aus der GPS-Position kurz nach Startup des C2T und der Momentanposition und versteht sich als Distanz in Projektion auf den Boden, nicht als Luftlinie zum Modell, Höhe einbezogen.
“Heading” ist die Richtung, in die die Nase des Modells momentan zeigt. Das kommt aus einem neigungskompensierten Kompass. “Neigung” basiert auf der IMU in der NAZA Main Unit, kommt letzendlich aus dem enthaltenen 3-dimensionalen Beschleunigungssensor (Gravitationsvektor) und, durch die IMU, auch vom 3-dimensionalen Gyro. Bezugspunkt ist aber der Gravitationsvektor. “Richtung” entspringt dem Erdmagnetfeld, gelesen mit dem 3-dimensionalen Magnetfeldsensor im GPS-Pilz, wobei dessen Werte durch die NAZA korrigiert werden anhand der Hard/Soft Iron Distortion Calibration, außerdem sind dessen Werte x/y/z, wie auch vermutlich x/y/z der Beschleunigungssensoren, normiert. D.h., die NAZA kennt die Min/Max der jeweiligen 3 Wertebereiche. Leider ist die Kalibrierungsprozedur, an die man sich aber halten MUSS, nicht geeignet, die z-Achse vollständig zu normieren, – es wird nur der halbe Weg durchfahren. Das bemerkt man dann daran, dass es zwischen “Missionars-” und Kopfstellung eine Abweichung um ca. 10° im Heading gibt. OK, die NAZA ist bisher nicht für Copter mit kollektiver Blattverstellung bzw. Motordrehrichtungsumkehr gemacht.
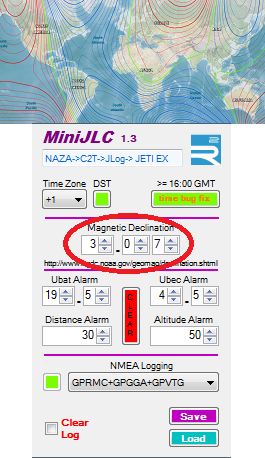
Magnetische Deklination (MD): Das Erdmagnetfeld ist nicht homogen, die Prozesse des “Geodynamos” und andere Aspekte (wie Anomalien durch Störkörper) bewirken das. Das führt zu Missweisungen eines Kompass, magnetischer und geografischer Nordpol decken sich i.allg. nicht. Die MD ist zeit- und ortsabhängig, berechenbar mittels eines veränderlichen mathematischen Modells: http://www.ngdc.noaa.gov/geomag/declination.shtml – C2T berücksichtigt die MD nicht, jedoch JLog, weshalb man die MD seines Ortes im MiniJLC angeben kann.
“Heading to Home” ist die Richtung, in die die Nase des Modells zeigen muss, um in direkter Linie zum Startpunkt zurückzufliegen. Der Wert basiert auf zwei GPS-Positionen, Start- und Momentanposition.
.
25.10.2014, nochmals geändert am 02.11.2014: Auf Wunsch von Tester Alois wurde das JETI Simple Text Display “Monitoring” durch eines ausgetauscht, was Alois für besonders nützlich hält im praktischen Betrieb. Es lehnt sich an ein Display von mikrokopter.de an:
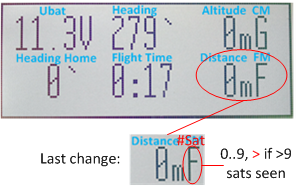
“Last change” erfolgte am 04.11.2014 mit JLog Firmware Minor Version .17
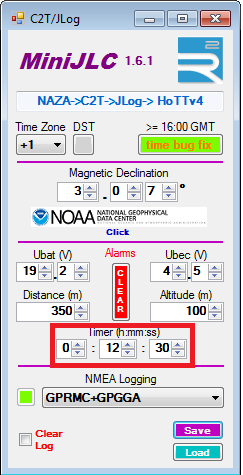
Altitude ist die relative Höhe über Grasnarbe, Druckänderung zwischen Start- und aktueller Zeit. CM == Control Mode (ATTI, GPS usw.), FM == Flight Mode. Log/Flight Time, angezeigt nur mm:ss, startet, sobald man das erste Mal in den Control Mode “GPS” geht. — Auf die Flight Time kann jetzt ein Alarm gesetzt werden, solange “mAh” nicht zur Verfügung steht. Dieser Timer startet, im Gegensatz zu Timern im Sender, statusabhängig, s.o. Seine maximale Laufzeit im Sinne einer Alarmschwelle beträgt 1:48:20. Da im Display kein Platz ist für den Stundenwert, wechselt der Doppelpunkt “:” zu “*“, wenn der Stundenwert “1″ ist.
Aufgrund des fünften Alarmtyps “Time Alarm” gibt es ihn folglich auch als Popup Page im JETI Simple Text Mode. Hier kann dieser Alarm wie alle anderen Alarme stumm geschaltet werden durch Taste “->”:
Wie zu sehen, “Time Alarm” wird grundsätzlich als “Capacity Alarm” in die Telemetrie gegeben.
Mit Deployment vom 1.Aug 2015 erhielten alle Firmwares einen sechsten Alarmtyp “satfix”. Dieser ist fix, kann (muss) nicht konfiguriert werden. Alarm wird ausgelöst, wenn “Runtime” seit wenigstens 15 Sekunden tickte (Sender schärfte NAZA via FM/CM), wenn der GPS Fix, nachdem er einmal 3(D) war, nun kleiner 3 wird. Der Alarm löscht sich selbst durch erneuten 3D Fix. In JETI Telemetrie erfolgt die Alarmgabe durch Senden des Alarmcodes “G”. Man kann nun einen geeigneten Voice File darauf mappen (ich verwendete “Range Test”).