Speed Messung an Luftfahzeugen, insbesondere an agilen, wie Modellen, ist eigentlich nicht wirklich einfach. Man muss seinen Genauigkeitsanspruch adäquat definieren, sonst erlebt man nur Frust.
Zwei grundsätzliche Methoden sind möglich, wenn es am Modell selbst gemessen werden soll: GPS oder Staurohr.
GPS (SOG – Speed Over Ground) ist sehr genau, hat aber seine Grenzen, wenn man von “Consumer Devices” für GPS Empfänger ausgeht. Das eine Limit ist, dass es nur bis max. 4G funktioniert. Will man mehr, müsste man tiefer in die Tasche greifen und einen ziemlichen Backstein von Gerät mitfliegen lassen. Es geht um die Anzahl sog. “Kanäle”, die parallel berechnet werden können. Also wird es Probleme geben, will man mit einem Speeder haarscharf um die Ecken fliegen, erwartet aber auf der anschließenden Geraden, dass “SOG” sofort ausgespuckt wird. Es könnte dann eher sein, dass der GPS Empfänger den “3D Fix” verlor. – Halbwegs geradlinige Bewegung ist gefordert. Außerdem ist “Ground” im GPS ein Modell, manchmal ziemlich weit weg von den tatsächlichen Gegebenheiten (“Ellipsoid”). – Weitere Anforderung ist, sich möglichst parallel zur Oberfläche des Ellipsoiden zu bewegen. Schwer zu machen mit Modellen.. Ein Gerät wie SM’s “GPS-Logger” verwendet daher eine “3D Korrektur” anhand der Höhenänderung. Die Höhe kommt aus einem Drucksensor und der sog. “Höhenformel” auf Basis des barometrischen Drucks. Da haben wir dann schon das komplexe Problem der Gase.., bzgl. der Höhenformel muss man ebenso Kompromisse machen wie beim Messen via den Staudruck. Außerdem ist so ein Drucksensor, MEMS (ist eh alles MEMS), auch nicht völlig unempfindlich gegenüber Beschleunigung.
Staurohr
“Staurohr” ist wohl noch der am wenigsten ingenieurtechnisch/wissenschaftlich unexakteste Oberbegriff. Die englischsprachige Welt sagt “pitot tube” bzw. “pitot head”. Nun, Herr Pitot hatte wesentliche Verdienste um das Prinzip, aber sein Pitot-Rohr war natürlich nicht der Weisheit letzte Schluß in dieser Angelegenheit. Wir verwenden einen Sensor von SM Modellbau, SM#2560. Das ist eine Prandtl-Sonde.
Wir messen Airspeed, nicht Speed Over Ground. Da haben uns dann die Gase beim Wickel, eigentlich eine komplexe Angelegenheit, komplexer, als es das Messen im Modellbau ökonomisch erlaubt. Die Gasdichte spielt eine Rolle, und die hängt unter anderem von dessen Temperatur und von der Höhe ab. Einige andere Faktoren on top, wie z.B. das Komprimieren der Gase im Rohr, ab einer bstimmten Geschwindigkeit nicht mehr zu vernachlässigen. OK, wir wollen keine Schallmauer brechen in 10.000m Höhe (MACH ist höhenabhängig, warum wohl? ). Solange wir nicht deutlich über 500km/h speeden, und in Höhen, die die Augen des Piloten am Grund noch erspähen, geht das auch so. Auch mit der Temperaturschichtung haben wir dann noch kein Problem.
Verwendet wird ein Differenzdrucksensor, das trennt Staudruck von Umgebungsdruck.
Natürlich hat der Drucksensor auch einen Temperaturgang, den kompensiert man aber. Trotzdem heisst es, sinnig mit ihm umzugehen. So ein Sensor erwärmt sich auch innerlich, der Chip tut es (MEMS). Es ist daher nicht verkehrt, nachdem man den Sensor akklimatisierte, ihn auch mal 1..2 Minuten einfach so laufen zu lassen, bevor man initialisiert (Nullsetzung in der messenden Routine, hier in JLog, durch Reset). Trotz der Differenzdruckmessung kann man natürlich keine völlige Unbeeindrucktheit des Systems erwarten, wenn sich gerade dramatisch schnell der Umgebungsdruck ändert: Noch schnell mal Speeden, da hinten zieht ‘ne schwarze Gewitterfront auf.
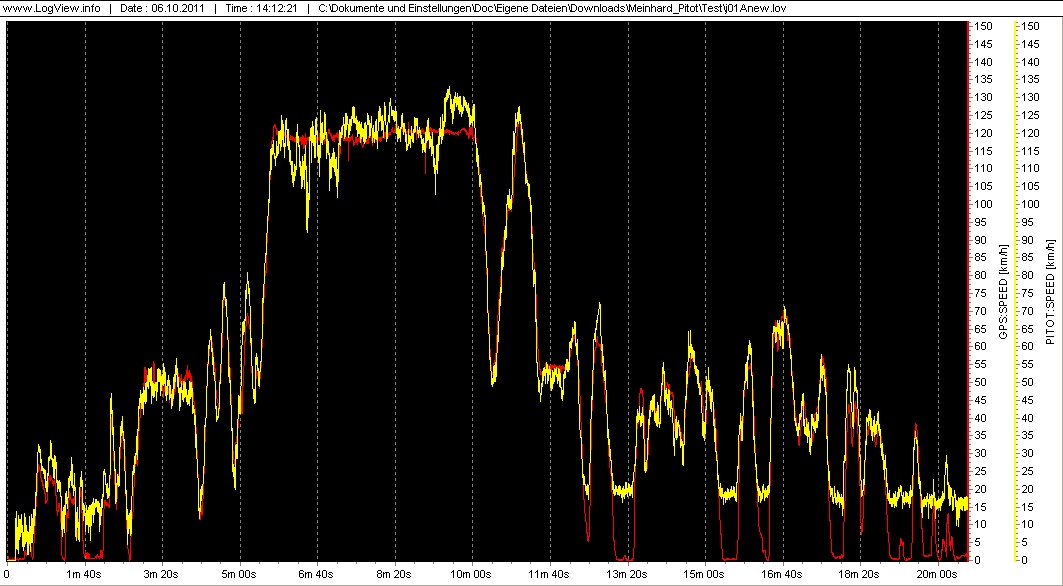
Air Speed vs. Ground Speed, – GPS vs. Differenzdrucksensor (Staurohr): JLog2 unterstützte mal, Speed und Altitude aus einem SM GPS-Logger zu lesen, via MSB (Multiplex Sensor Bus). In einer Spezialfirmware für Vergleichszwecke verwendete er gleichzeitig das Staurohr von SM. Hier eine der vielen Grafiken in Auswertung dessen, – das diente dem Kalibrieren des SM#2560 an JLog2, außerdem sollte ein geeigneter Integrationsfaktor zum Beruhigen der Kurve gefunden werden. Man sieht: Was aus dem GPS kommt, ist ruhiger. Ja, und letztendlich ist es auch genauer, wenn es um Ground Speed und Speed an sich geht. Man muss sich aber an die “GPS-Regeln” halten, s.o. – Das Rohr hatte ich monatelang auf dem Seitenspiegel meines Autos, morgens und abends je knappe 20km als Gemisch aus Stadt (Berlin) und Bundesstraße mit erlaubten 120km/h (ich fuhr etwas schneller ). Im Verlauf des Diagramms, bei Ampelstops, sieht man, wie der Nullpegel steigt. Das ist einerseits die endliche Temperaturkompensation, es mag sich aber auch der Luftdruck geändert haben. Der Sensor wurde vor jeder Fahrt akklimatisiert, dann “genullt”. (Eines mag das kleine Löchlein im Rohr gar nicht: Regen. )
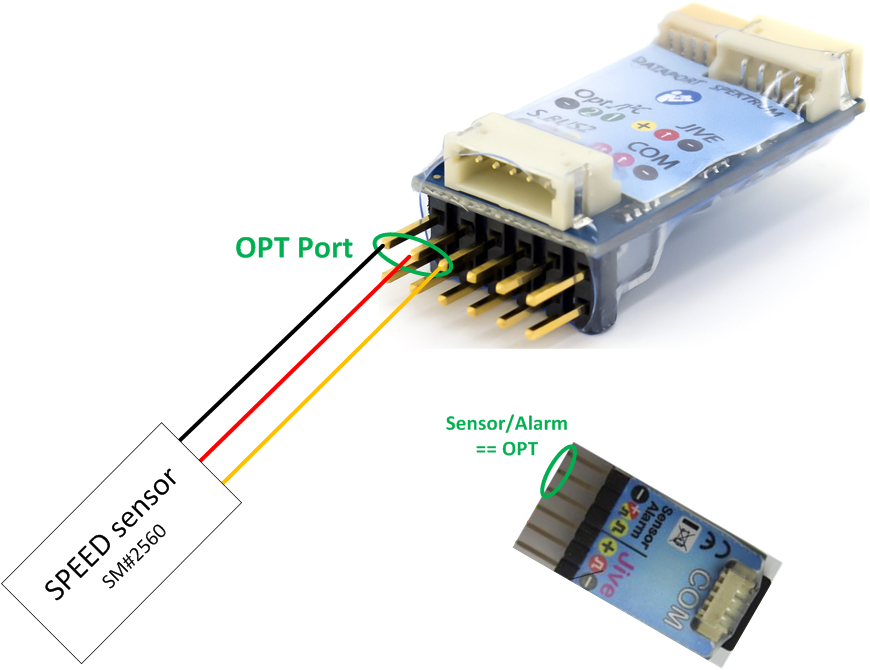
OK, so vorgespannt, schließen wir das Ding (SM#2560) an und konfigurieren es im JLC zur Verwendung durch JLog.
Der Sensor liefert eine Spannung, proportional zum Differenzdruck, woraus dann die Geschwindigkeit errechnet wird. Daher kann dieser Sensor nur an “OPT” angeschlossen werden, weil nur hier der Microcontroller von JLog mit zwei Eingängen seines A/D-Wandlers angeschlossen ist. Ist “OPT” besetzt durch SPEKTRUM oder HiTec Telemetrie (I²C Bus), geht das nicht.
Messbereiche
Am SM#2560 befindet sich eine Lötbrücke, mit der man zwei Messbereiche wählen kann. Dadurch ändert sich einfach ein Spannungsteiler am Ausgang des Drucksensors. Sinn dessen ist, die Auflösung des A/D-Wandlers im angeschlossenen Gerät richtig zu nutzen. Wer nur langsam fliegt, will “untenrum” höhere Auflösung, “obenrum” nutzt er nicht. Natürlich stößt man dabei auch irgendwann an die Auflösungsgrenze des Drucksensors selbst, und des Messprinzips!
Mit JLog gibt es aber noch eine “Software-Lötbrücke”, siehe JLC. Das hat folgende Gründe: a) ist es notwendig, weil die beiden Spannungsbereiche (siehe Lötbrücke) des SM#2560 zwar zu den Geräten von SM passen, aber weniger zu JLog. b) ist es möglich mit Jog. Warum also nicht nutzen?
Die A/D-Wandler in den von SM verwendeten Microcontrollern haben einen anderen Spannungsmessbereich, als die beiden, die die gegenwärtig noch in JLog genutzten Microcontroller haben. Der Messbreich bestimmt sich jeweils durch die im Controller verfügbare Referenzspannungsquelle, – es gibt davon zwei, software-selektierbar, im Controller von JLog. Außerdem haben die A/D-Wandler der MCUs von SM-Produkten 12 Bits Auflösung, die in den MCUs von JLog aber nur 10.
Somit ergeben sich 4 Geschwindigkeitsmessbereiche mit dem SM#2560 an JLog, die aus o.g. Gründen teilweise unnötig nahe aneinander sind sind:
Lötbrücke: Nein..Bereich: A………. 0..207 km/h
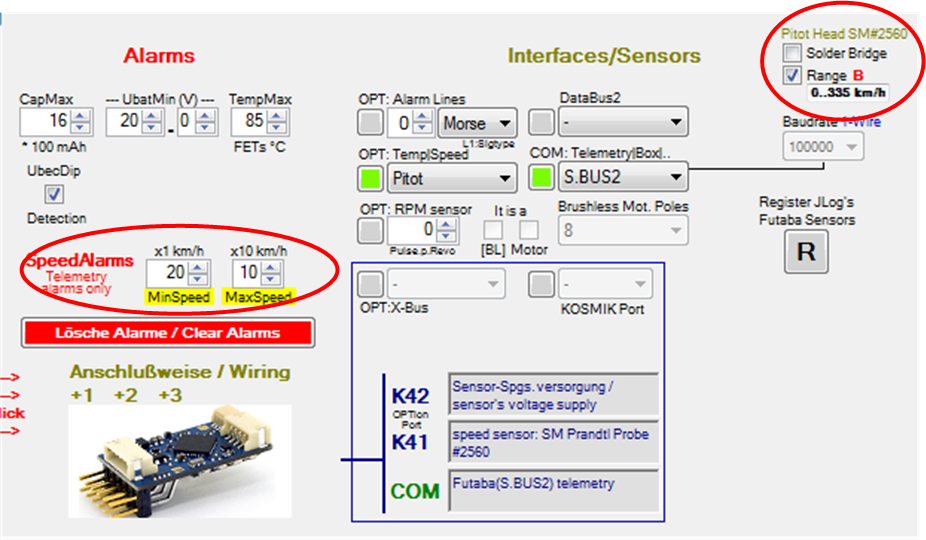
Lötbrücke: Nein..Bereich: B………. 0..335 km/h
Lötbrücke: Ja... ..Bereich: A………. 0..373 km/h
Lötbrücke: Ja.....Bereich: B………. 0..627 km/h
.
Speed Alarme
Siehe Screenshot des JLC: Eingestellt sind 20 km/h als MinSpeed (Stall Speed), 100 km/h für MaxSpeed (Overspeed). Der Stall Speed Alarm erfolgt erst dann, wenn dessen Wert einmal überschritten worden ist.
Multi-Sensor
Hat man parallel einen weiteren Sensortyp an “OPT”, z.B. Temperatursensor(en), dann beachte man bitte die Aufgabe der Stromversorgung der Sensoren, beschrieben in Multi-Sensor an “OPT”.

 ). Solange wir nicht deutlich über 500km/h speeden, und in Höhen, die die Augen des Piloten am Grund noch erspähen, geht das auch so. Auch mit der Temperaturschichtung haben wir dann noch kein Problem.
). Solange wir nicht deutlich über 500km/h speeden, und in Höhen, die die Augen des Piloten am Grund noch erspähen, geht das auch so. Auch mit der Temperaturschichtung haben wir dann noch kein Problem. ). Im Verlauf des Diagramms, bei Ampelstops, sieht man, wie der Nullpegel steigt. Das ist einerseits die endliche Temperaturkompensation, es mag sich aber auch der Luftdruck geändert haben. Der Sensor wurde vor jeder Fahrt akklimatisiert, dann “genullt”. (Eines mag das kleine Löchlein im Rohr gar nicht: Regen.
). Im Verlauf des Diagramms, bei Ampelstops, sieht man, wie der Nullpegel steigt. Das ist einerseits die endliche Temperaturkompensation, es mag sich aber auch der Luftdruck geändert haben. Der Sensor wurde vor jeder Fahrt akklimatisiert, dann “genullt”. (Eines mag das kleine Löchlein im Rohr gar nicht: Regen.