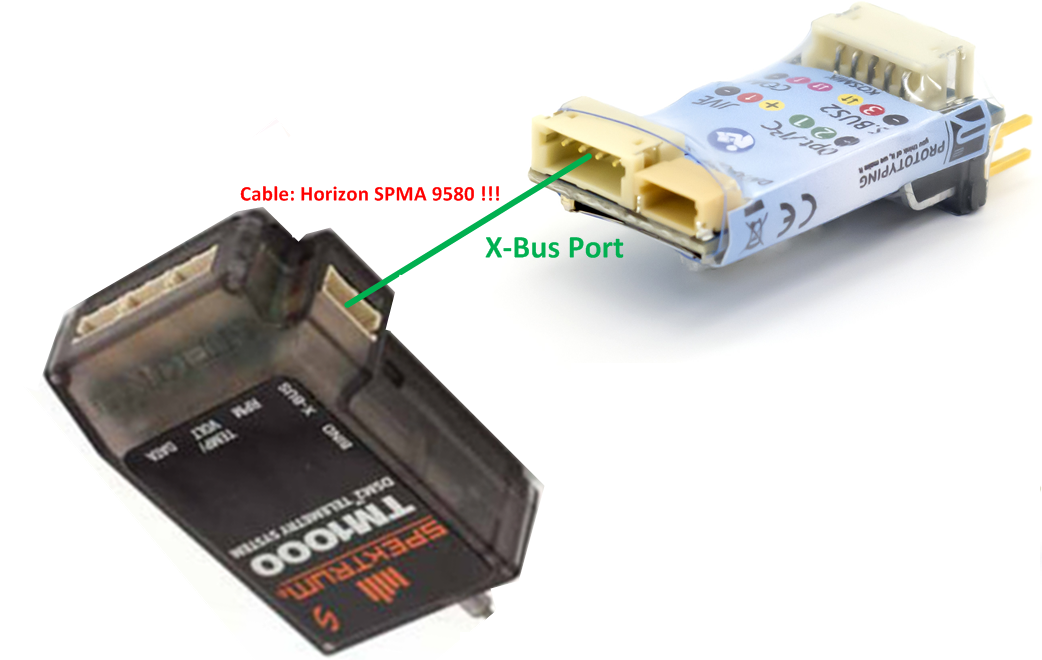
Was braucht man? C2T am NAZA CANbus, JLog2.6 UND: Horizon SPEKTRUM TM 1000 plus “X-Bus” Kabel SPMA 9580. Ein TM1100 ist nicht geeignet, denn der hat keinen X-Bus, außerdem ist dessen Reichweite beschränkt.
JLog wird via die X-Bus-Verbindung auch mit Betriebsspannung versorgt. Von JLog bekommt C2T seine Betriebsspannung, außerdem parallel vom CANbus.
Es handelt sich um 18 Daten in 4 Displays. (Auf Roll/Pitch wurde verzichtet, dafür gibt es, ebenso wie bei Futaba, keine wirklich geeigneten Subdisplays. Wer die Display-Verwendung mit mir diskutieren will, kann das hier tun: http://j-log.eu/forum)
Höhe (Altitude) als Höhe über Grasnarbe bildet C2T aus dem Absolutwert für Höhe (nach Wetterlage, sprich, Basis-Luftdruck), den er beim Einschalten sah und dem Momentanwert.
Distanz errechnet sich aus der GPS-Position kurz nach Startup des C2T und der Momentanposition und versteht sich als Distanz in Projektion auf den Boden, nicht als Luftlinie zum Modell, Höhe einbezogen.
“Heading” ist die Richtung, in die die Nase des Modells momentan zeigt. Das kommt aus einem neigungskompensierten Kompass. “Neigung” basiert auf der IMU in der NAZA Main Unit, kommt letzendlich aus dem enthaltenen 3-dimensionalen Beschleunigungssensor (Gravitationsvektor) und, durch die IMU, auch vom 3-dimensionalen Gyro. Bezugspunkt ist aber der Gravitationsvektor. “Richtung” entspringt dem Erdmagnetfeld, gelesen mit dem 3-dimensionalen Magnetfeldsensor im GPS-Pilz, wobei dessen Werte durch die NAZA korrigiert werden anhand der Hard/Soft Iron Distortion Calibration, außerdem sind dessen Werte x/y/z, wie auch vermutlich x/y/z der Beschleunigungssensoren, normiert. D.h., die NAZA kennt die Min/Max der jeweiligen 3 Wertebereiche. Leider ist die Kalibrierungsprozedur, an die man sich aber halten MUSS, nicht geeignet, die z-Achse vollständig zu normieren, – es wird nur der halbe Weg durchfahren. Das bemerkt man dann daran, dass es zwischen “Missionars-” und Kopfstellung eine Abweichung um ca. 10° im Heading gibt. OK, die NAZA ist bisher nicht für Copter mit kollektiver Blattverstellung bzw. Motordrehrichtungsumkehr gemacht.
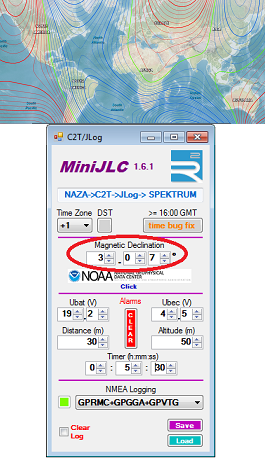
Magnetische Deklination (MD): Das Erdmagnetfeld ist nicht homogen, die Prozesse des “Geodynamos” und andere Aspekte (wie Anomalien durch Störkörper) bewirken das. Das führt zu Missweisungen eines Kompass, magnetischer und geografischer Nordpol decken sich i.allg. nicht. Die MD ist zeit- und ortsabhängig, berechenbar mittels eines veränderlichen mathematischen Modells: http://www.ngdc.noaa.gov/geomag/declination.shtml – C2T berücksichtigt die MD nicht, jedoch JLog, weshalb man die MD seines Ortes im MiniJLC angeben kann.
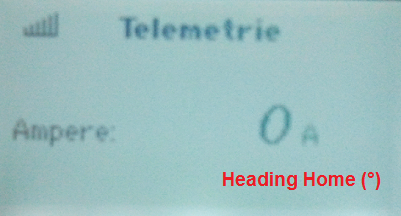
“Heading to Home” ist die Richtung, in die die Nase des Modells zeigen muss, um in direkter Linie zum Startpunkt zurückzufliegen. Der Wert basiert auf zwei GPS-Positionen, Start- und Momentanposition.
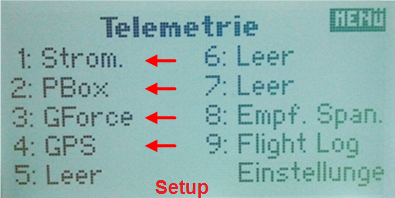
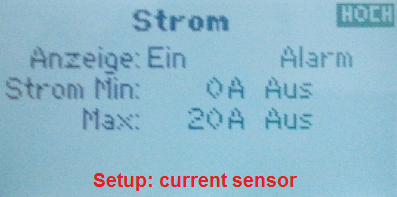
Das Setup des SPEKTRUM Senders sollte anhand der folgenden Bilder selbsterklärend sein. C2T/JLog verwenden 4 SPEKTRUM Sensor-Displays, – Current, PowerBox, GForce und GPS, wobei GPS bustechnisch eigentlich zwei Sensoren darstellt. — Bitte beachten: Es geht erst ab dem Sender DX8, – eine DX7S ist schon mal deswg. nicht geeignet, weil sie keinen Sensor “PowerBox” kennt.
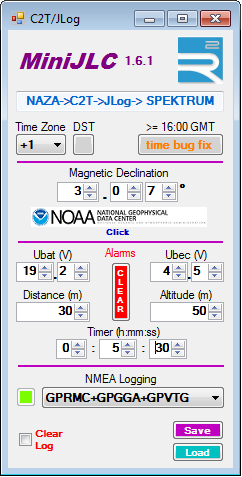
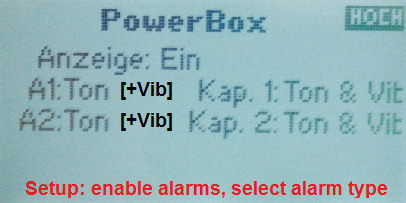
Die Schwellen der insgesamt 5 möglichen Alarme werden im MiniJLC eingestellt:Vier davon, bis auf den Ubec Alarm, werden im Sensor “PowerBox” ausgelöst. Man muss nur das Alarming auf allen 4 Subdisplays erlauben (Sender Setup) und einen Alarmtyp jeweils wählen, – Ton, Vibrator oder beides.
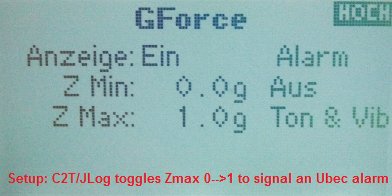
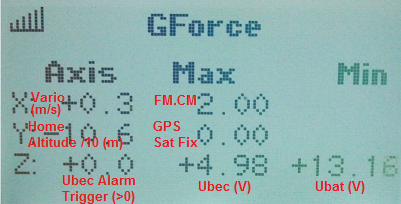
Der Ubec Alarm wird via “Z live” im Display “GForce” ausgelöst, und zwar durch Überschreiten des Wertes Null. Das macht JLog, er sendet eine “1″ im Falle eines Ubec Alarms. Man muss nur die Alarmschwelle (größer Null) im “GForce” Sensor einstellen, also im Sender Setup.
“GPS”: Hier als Zeitzone Null (GMT) wählen, denn das Korrigieren der UTC Zeit vom GPS machen C2T und JLog, – a) nach gewählter Zeitzone, b) bzgl. des erforderlichen Kompensierens des Time Bugs im GPS Pilz.
.
Logging: Es gibt eine Reihe Gründe, das Logging JLog machen zu lassen. Hier (SPEKTRUM) gibt es einen weiteren, nicht das Log Recording des Senders zu verwenden: Die Integrität übertragener Daten wird nicht geprüft. Das kann zu immensen “Hausnummern” führen.
So sieht das Who-is-Who der Displays aus:
.
Mit Deployment vom 1.Aug 2015 erhielten alle Firmwares einen sechsten Alarmtyp “satfix”. Dieser ist fix, kann (muss) nicht konfiguriert werden. Alarm wird ausgelöst, wenn “Runtime” seit wenigstens 15 Sekunden tickte (Sender schärfte NAZA via FM/CM), wenn der GPS Fix, nachdem er einmal 3(D) war, nun kleiner 3 wird. Der Alarm löscht sich selbst durch erneuten 3D Fix. Der Alarm geht zusätzlich zu Distance Alarm auf “Kapazität 1″ in PowerBox. Das Verwenden von Z-live (siehe Ubec Alarm) in G-Force war zumindest mit einer Dx9 leider unmöglich. (Z-Live sollte verwendet werden, um “satalarm” konfigurativ am Sender ausblenden zu können.) Es stellte sich heraus, dass die Alarmgabe des Senders nicht stoppt, wenn die Alarmschwelle wieder unterschritten wird (Bug). Löscht man nun (logischerweise, weil lästig) diesen Alarm manuell (CLEAR), dann kann er innerhalb der Boot Session des Senders nie wieder ausgelöst werden.